After the last generation of the ARM architecture link library, we have to copy them to the SD card loaded with the file system. When copying, it is better to use /usr/lib.
Practice one: copy those libs to the U disk, because before running the demo, which is a simple Linux system, let him try it for a while, after the normal boot, mount the U disk, these have been done before , mount / dev / sda1 / mnt copy folder cp -R / mnt / lib / usr / results appear
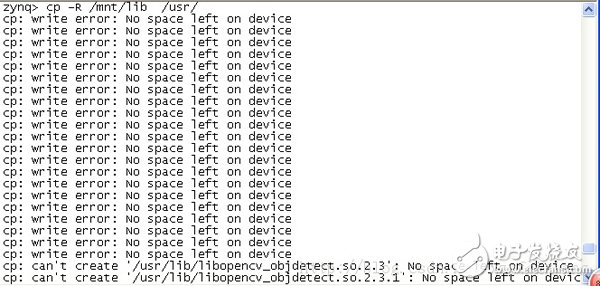
Insufficient space for prompts, carefully found the problem, found that the ramdisk image can only have a maximum of 8M, and the entire lib has 10.3M, it will definitely indicate that the space is insufficient, look at the files under /usr/lib
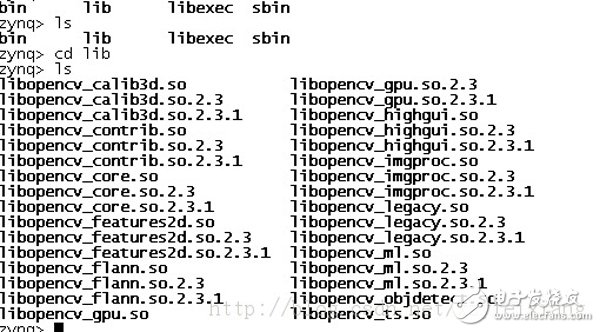
I found that some lib files were copied in. At this time, I thought of the method of practice two.
Question: Then there is another sentence in the book. If you are using the ramdisk file system, you need to recompress an image file after copying the Opencv link library. (To solve this problem)
Problem explanation: From rainysky, the system used is the lite version of the system that comes with SD. The capacity is relatively small. It is impossible to directly copy the compiled files into it, and only make a mirror.
Practice 2: I want to use the files in the single board machine (the ninth chapter of the CD) to experiment, the system of the single board machine linaro system, there is a sd card has been partitioned before, can only read under windows The first partition, the second partition can not be read under Windows. Copy BOOT.BIN, zImage, devicetree.dtb, zynq-zed-adv7511.dtb to the first partition, which is the FAT partition. Copy ubuntu-image.tar.gz to EXT4 partition under linux, but it turns out that this system can't start normally. Is it because the peripherals of PC need to be started normally? ? (To be verified), now it can only be a mirror. It turns out that there is a problem with the BOOT.BIN file provided by the CD, and it is still to be tested.
Practice three:
The method of making the image: OpenCV library:
Dd if=/dev/zero of=qt_lib.img bs=1M count=80//The combination of count and bs here means to make an 80M image. Specifically, you can set the count according to the total size of the actual link library.
Mkfs.ext2 -F cv_lib.img
Chmod go+w cv_lib.img
Mount cv_lib.img -o loop /mnt
//cp -rf $ZYNQ_QT_INSTALL/* /mnt (Look at the path of your installation, mine is below)
Cp –rf /home/xzy/Opencv2.3.1/install/* /mnt
Chmod go-w cv_lib.imgumount /mntZedboard
Test Note The cross editor uses -I and -L to specify the location of the link library when compiling the code. Wait for the next post
arm-xilinx-linux-gnueabi-g ++ -I /home/xzy/OpenCV-2.3.1/install/include -I / home / xzy / OpenCV-2.3.1 / install / include / opencv -L / home / xzy / OpenCV-2.3.1 / install / lib -lopencv_core -lopencv_imgproc -lopencv_highgui -lopencv_ml -lopencv_video -lopencv_features2d -lopencv_calib3d -lopencv_objdetect -lopencv_contrib -lopencv_legacy -lopencv_flann ./edge_detecTIon.cpp -o ./edge_detecTIon.o
Here is the edge_detecTIon.cpp on the book.
Copy the library file directly to the sd card, and then start the sd card, then do the following:
Mount /dev/mmcblk0p1 /mnt/ //mount the rest of the sd card,
Ls can see the image file
Mount /mnt/cv_lib.img /choose/a/directory/to/mount// Then set the path of the dynamic link library, ie LD_LIBRARY_PATH environment variable export LD_LIBRARY_PATH=/usr/lib If this is the path (/usr/lib) No, I will search for myself.
In front are set up, run time results appear error while loading shared libraries: libstdc ++ so.6:. Can not open shared object file: No such file or directory, subject to verification, if this image is running, then there will be a problem, The stdc++.so library cannot be found at runtime, so you need to copy this library to /home/xzy/opencv-2.3.1/install/lib first. The source files are in the cross compiler. The total commands are: Cp /root/CodeSourcery/Sourcery_CodeBench_Lite_for_Xilinx_GNU_Linux/arm-xilinx-linux-gnueabi/libc/usr/lib/libstdc++.so* /home/xzy/opencv-2.3.1/install/lib)
Then recreate the image file. So far the name is opencv_lib.img, or it is possible to mount this library to the /usr/lib directory. I re-create the image file here, after the mount, mount, run. /edge_detecTIon_arm lena.jpg lena_edge.jpg The result is a Segmentation fault, suspected to be a picture format problem, and sure enough, after switching to a bmp image, ./edge_detection. o ./lena.bmp ./lena_edge.bmp, appears sucessful, I know that success, copy the generated image to the U disk, to the PC to see this, opencv ported to zedboard is successful.

Electric Battery, an electrochemical device to provide electrical power
Two Kinds of solar battery are included.
1.AMG Battery
2.Gel Batter
Through this post, we`re comparing the two battery types in order to help you see which one suits your needs.
Similarities
The two batteries are classified as Valve Regulated Lead-Acid (VRLA) batteries. The oxygen produced on the positive plates of lead-acid batteries is absorbed by the negative plates. In turn, the negative plates produce water. This helps expel the heat from the chemical reaction produced by the electrolytes. Because of this, the user does not have to water these batteries, making them maintenance-free.
Differences
AGM batteries make use of a special glass mat made up of thin glass fibers. This is designed to absorb the electrolytes between the battery plates.
Gel batteries, on the other hand, utilize a special type of silica gel that holds electrolytes together. The thick consistency of the material allows electrons to flow freely from the plates.
Gel Cell Battery,Deep Cycle Gel Battery,Gel Leisure Battery,Gel Type Battery
NANTONG RONGCHANG IMPORT&EXPORT CO.,LTD , https://www.ergsolarcn.com